

Robot Controller
Optimized for Industrial Robots.
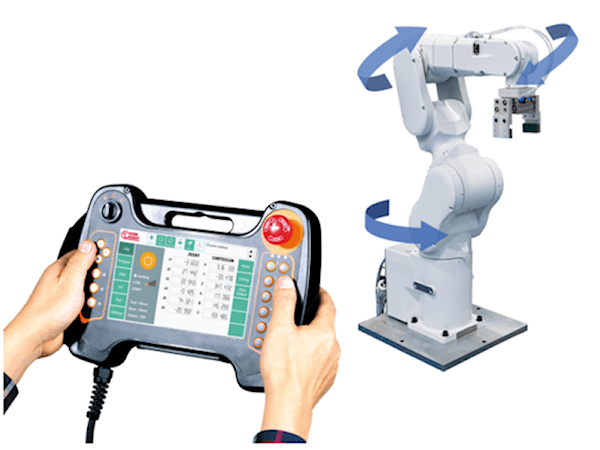
Robot Motion Controller
DTP10-coreCon

Technical info

CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

Display
10.1″ ISP TFT LCD
1280 x 800 resolution
USB HID Interface
Switch
Emergency stop, Select, 3 level Enabling

Memory
DDR3 800MHz 1GB

OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
EtherCAT Master 1.5.2
File System ext4

Dimension
325x238x42mm

Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)

Interface
EtherCAT, Ethernet,
RS-485

Weight
1500g (Without Cable)
Download the product guide for the DAINCUBE DTP10-coreCon here.
(Click QR Code recognition or Download button)

coreCon
Setting & Configuration
1. Quick Setting

Select Robot Type

Driver Spec

Dimension

Work Range

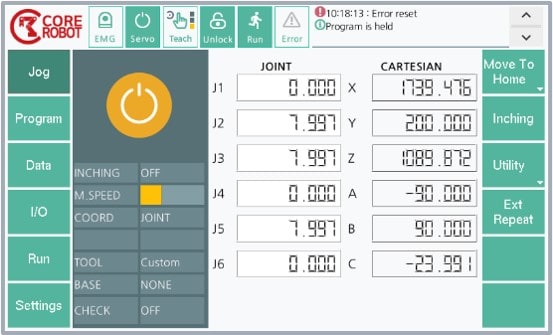
Jog
2. Jogging (Teaching)
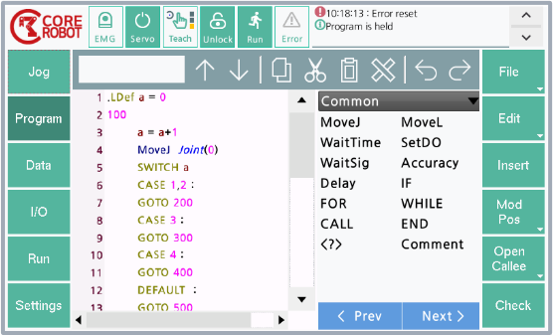
3. Programming
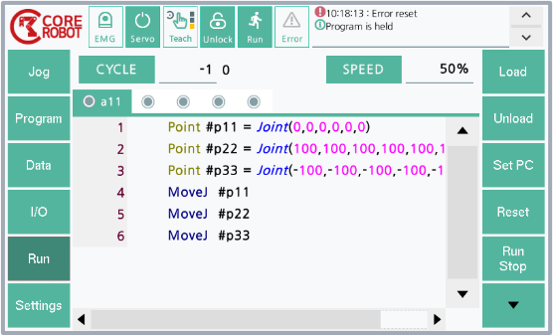
4. Run (Repeat)
coreCon
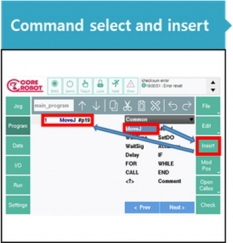
Robot Job Programming
1. How to Create on Controller




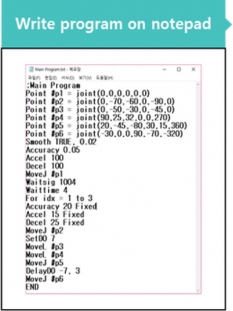
2. How to Create on PC



coreCon