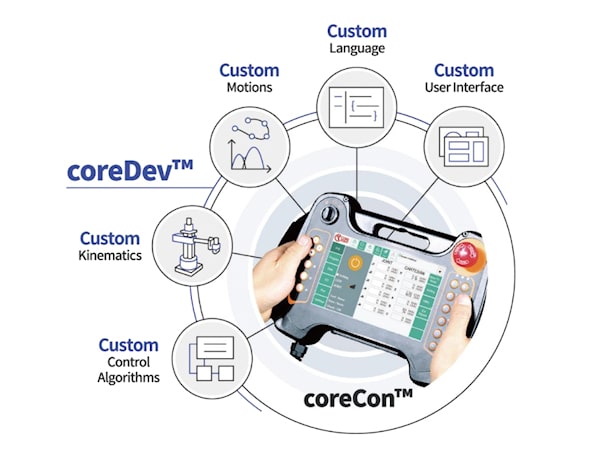
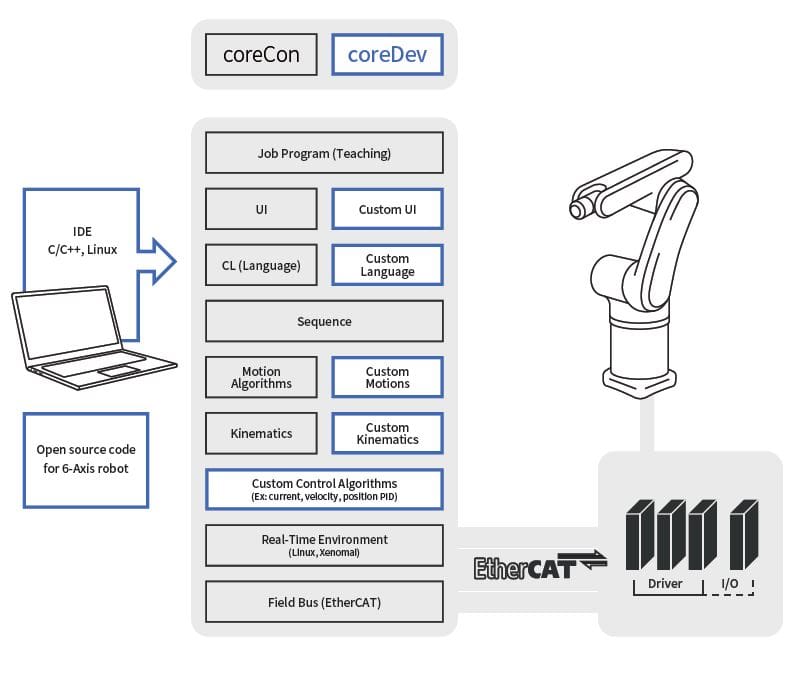
定制开发软件
可以适用用户自定义的UI以及语言(Language)、运动学(Kinematics)、动作(Motions)、算法 (Algorithms)
coreDev以插件的形式向运动控制器(即corecon)提供用户界面、机器人语言/运动/控制算法,同时还提供S/W和开发环境。除补助示教、作业编程语言、动作控制、监控、功能设置外,还提供用户S/W开发环境,以便于用户开发自定义的机器人运动/控制算法和个性化UI。coreDev为插入式实时任务操作结构,与corecon内置功能配合使用时,可以帮助用户开发专业的APP。此外,利用coreconaAPI提供的信息(关节位置/速度/加速度、末端执行器的位置/方向、电机扭矩反馈、控制参数等),更有效地开发和应用适用用户自定义算法的机器人。
基本技术参数

处理器
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

操作系统
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7

存储器
DDR3 800MHz 1GB

通讯接口
EtherCAT, Ethernet,
RS-485

硬盘
eMMC 8GB (MLC type)
MRAM 2MB

电源
DC 24V

S 公司
H 公司
D 公司